Learning Physical Human-Robot Cooperation Tasks
Project type
Industry project (Honda Research Institute Europe GmbH, HTSM PPS-toeslag); 2017-2022
Abstract
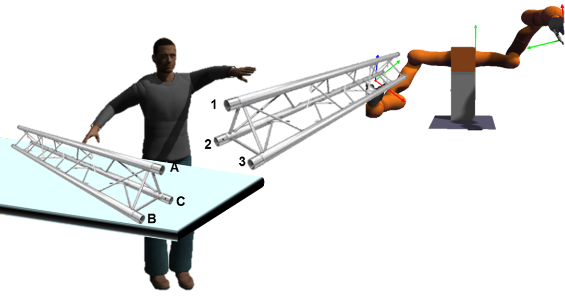
Human-robot interaction and collaboration is of fundamental importance for any robot leaving the safety of fences on a highly-structured factory floor: service and care scenarios, medical applications, offshore, maintenance and inspection, as well as industrial assembly. In this project, we will develop new concepts and techniques for robot learning that endow robots with the capability to physically interact and collaborate with humans. In particular, we will consider tasks related to joint handling of large objects, i.e., jointly transporting and manipulating them. Examples include transporting and assembling light traverses, or changing tires on a car.
Project members
ir. Linda van der Spaa, ir. Tamas Bates, Dr. Jihong Zhu, Dr.-Ing. Jens Kober, Dr.-Ing. Michael Gienger
Publications with videos
. Simultaneously Learning Intentions and Preferences during Physical Human-Robot Cooperation. Autonomous Robots, 48(4):11, 2024.
[bibtex] [pdf] [doi] [code] [video] ![]()
. Learning from Few Demonstrations with Frame-Weighted Motion Generation. In Experimental Robotics: The 18th International Symposium (ISER 2023) (Marcelo H. Ang Jr, Oussama Khatib, eds.), pp. 339–350, 2024.
[bibtex] [pdf] [doi] [video] ![]()
. Robotic Fabric Flattening with Wrinkle Direction Detection. In Experimental Robotics: The 18th International Symposium (ISER 2023) (Marcelo H. Ang Jr, Oussama Khatib, eds.), pp. 339–350, 2024.
[bibtex] [pdf] [webpage] [doi] [video] ![]()
. An Incremental Inverse Reinforcement Learning Approach for Motion Planning with Separated Path and Velocity Preferences. Robotics, 12(2):61, 2023.
[bibtex] [pdf] [doi] [video] ![]()
. Do You Need a Hand? - A Bimanual Robotic Dressing Assistance Scheme. IEEE Transactions on Robotics, 40:1906–1919, 2024.
[bibtex] [pdf] [webpage] [doi] [video] ![]()
. Disagreement-Aware Variable Impedance Control for Online Learning of Physical Human-Robot Cooperation Tasks. In ICRA 2022 full day workshop - Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust, 2022.
[bibtex] [pdf] [url] [code] [video] ![]()
. Learning Task-Parameterized Skills from Few Demonstrations. IEEE Robotics and Automation Letters, 7(2):4063–4070, 2022. The contents of this paper were also selected by ICRA'22 Program Committee for presentation at the Conference.
[bibtex] [pdf] [webpage] [doi] [code] [video] ![]()
. Predicting and Optimizing Ergonomics in Physical Human-Robot Cooperation Tasks. In IEEE International Conference on Robotics and Automation (ICRA), pp. 1799–1805, 2020.
[bibtex] [pdf] [doi] [video] ![]()
. Human-Robot Cooperative Object Manipulation with Contact Changes. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1354–1360, 2018.
[bibtex] [pdf] [doi] [video] ![]()
Publications without videos
. Do You Need a Hand? - A Bimanual Robotic Dressing Assistance Scheme. IEEE Transactions on Robotics, 40:1906–1919, 2024.
[bibtex] [pdf] [webpage] [doi] [video] ![]()
. Challenges and Outlook in Robotic Manipulation of Deformable Objects. IEEE Robotics & Automation Magazine, 29(3):67–77, 2022.
[bibtex] [pdf] [url] [doi] ![]()
. Head-tracked off-axis perspective projection improves gaze readability of 3D virtual avatars. In SIGGRAPH Asia Technical Briefs, pp. 1–4, 2018.
[bibtex] [pdf] [doi] ![]()